
摘要
近年来,深度学习算法得到了长足的发展,并开始应用于云检测。但是深度神经网络模型参数众多,依赖大量训练样本,因此理解其泛化性能对于深度学习在不同遥感影像的实际应用具有重要的参考价值。本文以深度语义分割算法DeepLabv3+为例,以一组广泛使用的云标记数据集“L8 Biome”为验证数据,探讨该算法用于云检测时在不同的地表景观、空间分辨率和光谱波段组合的遥感影像上的泛化性能。云标记数据集“L8 Biome”包含96景具有全球代表性的Landsat 8 OLI影像及相应的人工云掩膜,被广泛用于测试云和云阴影检测算法性能。首先,利用Landsat 8 OLI云标记数据集“L8 Biome”,构建不同类型景观、不同空间分辨率、不同波段组合的训练影像集和测试影像集;其次基于不同训练样本集和测试集,评估了DeepLabv3+算法在不同情况下的云检测精度,并与Fmask算法作对比分析。研究结果表明:(1)使用全混合景观类型的训练集训练出来的云检测网络在总体检测精度(92.81%)与稳定度(标准差12.08%)上都优于使用单一景观类型的训练集训练得到的云检测网络,也优于Fmask的总体精度(88.75%)与稳定度(标准差17.34%),说明在构建深度学习算法的训练集时,应该尽可能包含多类型的地表景观;(2)将全混合景观训练集中剔除一类景观的样本(冰/雪景观除外)构建的“混合-1”训练集与全混合景观训练集训练的DeepLabv3+网络的云检测精度也相差不大,说明现有训练样本集已具备较强的景观泛化能力;(3)基于30 m空间分辨率的全混合景观训练样本集训练得到的DeepLabv3+云检测网络在不同分辨率(30 m、60 m、120 m、240 m)的测试集上云检测精度差异不大,都取得较好的效果,说明DeepLabv3+能够泛化应用于不同空间分辨率的遥感影像,相反Fmask直接应用于低分辨率影像时精度明显下降;(4)DeepLabv3+能充分自适应不同波段的信息用于云检测,总体来说更多的光谱波段输入能够提高DeepLabv3+的云检测的精度和稳定度,其中短波红外波段对于DeepLabv3+区分冰/雪与云具有重要价值,而热红外波段对DeepLabv3+云检测网络的性能提升很微小。以上结果说明利用现有数据集“L8 Biome”训练的DeepLabv3+云检测网络能够适用于多种类型的遥感影像,并优于Fmask算法。
云污染阻碍光学传感器从地表获取辐射信息,严重影响到地面目标的解译和陆地、海洋、大气相关参数的定量反演,已成为光学遥感影像应用中最重要的障碍之一(
目前,已开发的云检测方法可以分为两类:基于物理特征的经验规则算法和基于机器学习的算法。第一类算法基于云的“亮”、“白”、“冷”和“高”4个方面的物理特征,通过分析云和典型地表之间光谱差异确定阈值或规则,从而实现云检测(
基于机器学习的算法将云检测视为二类分类问题。这类算法使用由人工解译的训练数据集,训练特定分类器(监督分类)进行云识别。例如,
针对上述需求和存在问题,本文以“L8 Biome”云标记数据集为基础,构建不同景观类型、不同光谱波段组合、不同空间分辨率的云检测训练集与测试集,探究一个典型的深度学习算法DeepLabv3+在这3个方面的泛化性能。“L8 Biome”数据集是一组以Landsat 8 OLI为基础的云标记数据集,被广泛应用于云检测算法的开发与评估(
“L8 Biome”数据集(
为更好的比较DeepLabv3+和Fmask算法的云检测性能,本研究的实验中涉及的波段和Fmask算法相同(
注: Fmask和DeepLabv3+使用波段以粗体字突出显示。
DeepLabv3+是一个典型的基于深度神经网络的语义分割算法,其在多个研究中展示出较好的图像分割性能(
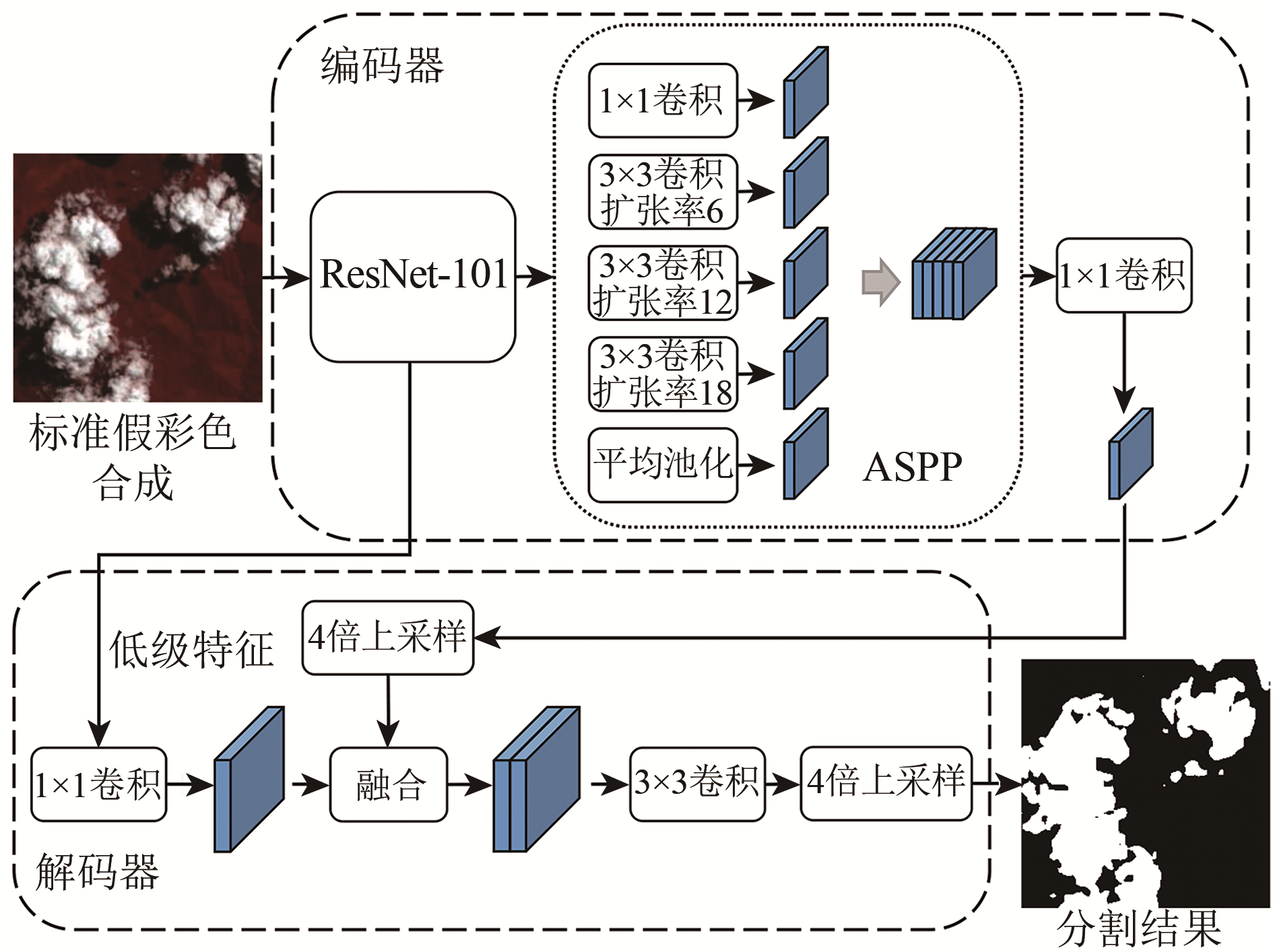
图1 DeepLabv3+网络结构
Fig.1 The network structure of DeepLabv3+
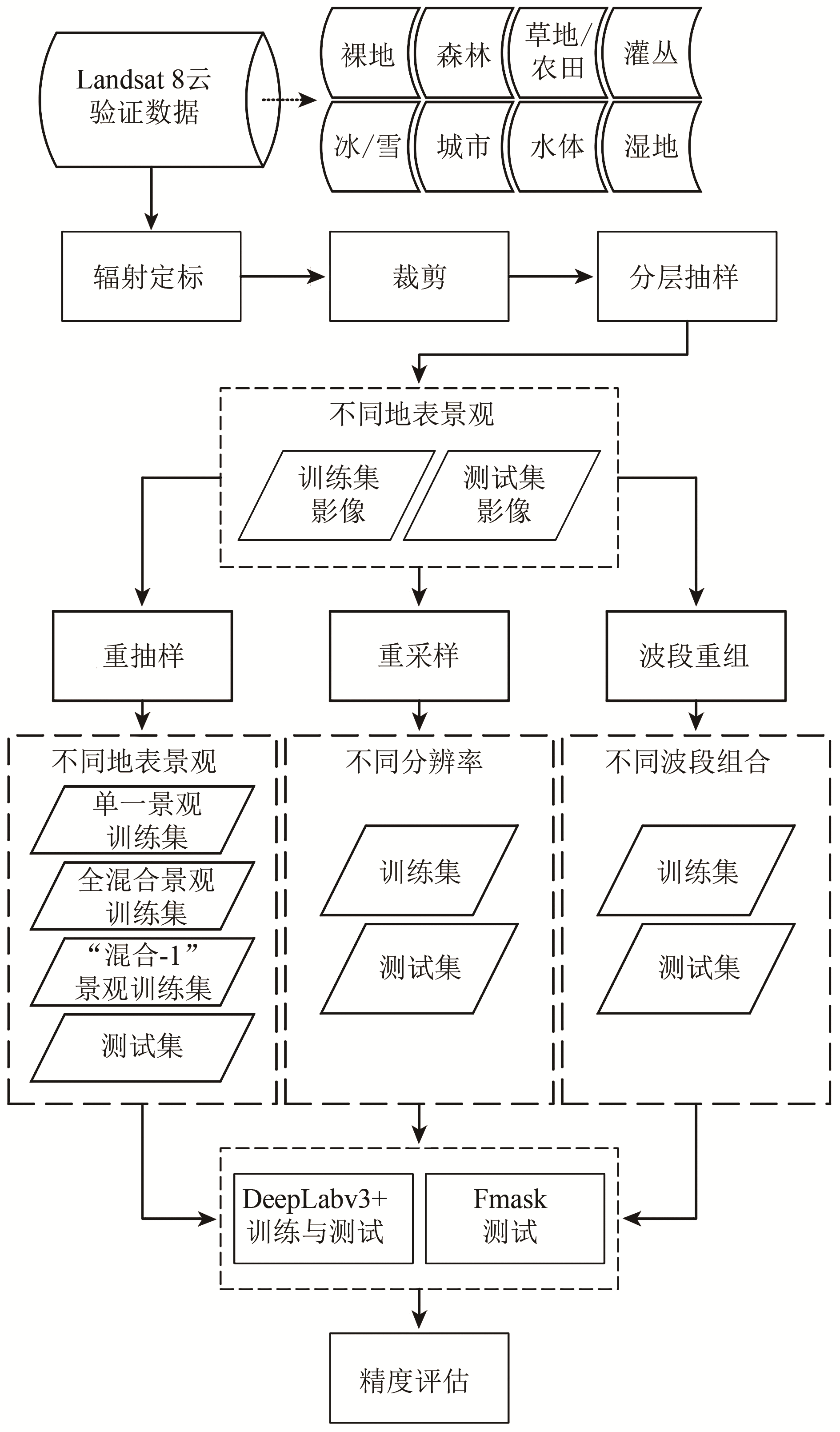
图2 实验流程图
Fig.2 Flow chart
本文将“L8 Biome”数据集的96幅影像均分为两部分,分别组成训练集和测试集各48景。其中每类景观的训练集和测试集各包含6景影像。在样本制作时,由于计算资源的限制不可能对遥感影像进行分割,需要将其裁剪成小幅图像。为避免边界问题,对影像进行裁剪时,参照
(1)不同地表景观的影像样本制作:在本组实验中,对上述训练样本进行重新抽样,以构建不同混合程度的训练样本,从而考查DeepLabv3+算法对未知景观图像的泛化性能。首先,构建8组单一地表景观的训练样本,即每组训练样本仅由一类地表景观中的3287个256×256影像样本组成,该组样本考查单一地表景观样本训练出的网络的云检测性能。其次,构建1组全混合地表景观的训练样本,即样本中包括所有8类地表景观,每类从训练集中随机抽出的411个256×256影像样本,共计411×8=3288个样本,该组样本考查混合地表景观样本训练出的网络的云检测性能。考虑到实际应用中,混合训练样本集也不可能包括所有景观,为考查训练样本集包括的景观不完整时网络模型的云检测性能,采用留一法构建次混合景观的训练样本,即从全混合训练集中分别剔除一种景观的数据,组成8个“混合-1”景观的训练集,包括“混合—冰雪”、“混合—湿地”、“混合—城市”、“混合—草地/农田”、“混合—裸地”、“混合—森林”、“混合—水体”、“混合—灌丛”。因此,总计得到了8个单一景观、1个全混合景观、8个“混合-1”的次混合景观的训练集;将以上训练样本训练出的17个云检测网络分别用于测试集的云检测,以考查不同景观样本训练出的网络模型在不同地表景观影像上的表现。
(2)不同空间分辨率的影像样本制作:在本组实验中,分别对48景训练影像与48景测试影像进行空间重采样,构建了30 m与240 m两种空间分辨率的训练样本集,以及30 m、60 m、120 m以及240 m等4种空间分辨率的测试样本集,从而考查训练样本与测试图像空间分辨率不一致时,DeepLabv3+的云检测性能。本文通过均值重采样的方法改变遥感影像的空间分辨率。而对人工云掩膜数据的重采样没有采用一般分类图常用的众值重采样,而是遵循对含云像元宁缺勿漏的保守原则——粗像元内只要有一个细像元受云污染,则该粗像元即标记为云污染像元。需要注意的是,对于不同分辨率的整幅遥感影像依然以256×256的大小裁切成影像样本。因此,不同分辨率的256×256影像样本所对应的实际地面大小是不一样的,比如60 m分辨率下的256×256样本影像大小为15.36 km×15.36 km,而240 m分辨率下的256×256样本影像大小为61.44 km×61.44 km。将30 m与240 m分辨率训练集训练的两个DeepLabv3+云检测网络分别用于上述4种空间分辨率的测试影像集,以比较其在不同空间分辨率影像上的泛化能力。
(3) 不同波段组合的影像样本制作:由于一种波段组合的影像无法输入另一种波段组合数据训练的网络,因此在本组实验中,对训练集和测试集同时改变其光谱波段组合,以探究DeepLabv3+在不同波段组合遥感影像下的云检测性能。本文构建了5种波段组合:1) Fmask算法使用的所有波段(All);2) 除热红外波段外的Fmask使用的其他波段(All-NT);3)红光、绿光、蓝光、近红外波段(RGBN);4)红光、绿光、蓝光波段(RGB);5)绿光波段(G)。本组实验样本考查不同波段组合对DeepLabv3+算法的影响。
基于3.2.1制作的不同训练集,对DeepLabv3+的网络参数进行训练,生成相应的不同云检测网络。然后,将测试集的样本影像输入云检测网络,得到256×256大小的云检测结果。为恢复裁剪前遥感影像,根据缓冲区大小,拼接每一小图像中心208×208区域的云检测结果,最后得到和原始整幅遥感影像大小一致的云检测结果。最后,使用总体精度Acc(Accuracy)指标对云检测结果进行定量评价:
| (1) |
式中,TP为被正确检测的云像元数目,FP为被错误检测的云像元数目,TN为被正确检测的无云像元数目,FN为被错误检测的无云像元数目。此外,本文还计算了不同影像总体精度的标准差以评价模型的稳定度。
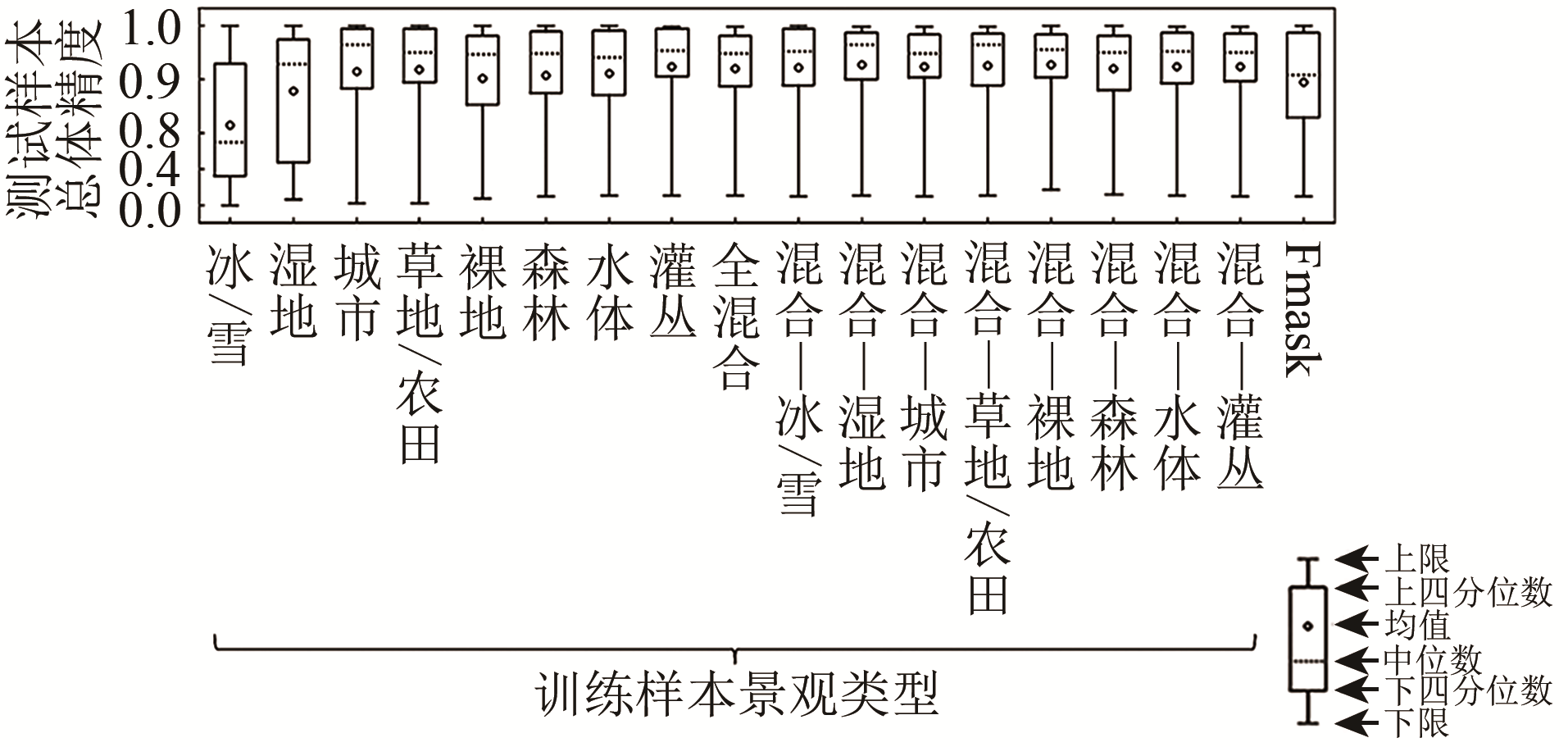
图3 不同景观样本训练得到的DeepLabv3+网络及Fmask在所有测试影像上的云检测总体精度
Fig.3 The cloud detection accuracies of all test images for different cloud detection methods, i.e. DeepLabv3+ trained by training set of different landscapes and Fmask

图4 不同景观样本训练得到的DeepLabv3+网络及Fmask在不同景观测试影像上的总体精度(其中每个子图表示不同方法在一种景观测试影像上的精度)
Fig.4 The cloud detection accuracies of test set with different landscapes for different cloud detection methods, i.e. DeepLabv3+ trained by training set of different landscapes and Fmask (each subplot represents the accuracy of test set with single landscape)
总体说来,当包含冰/雪景观的训练样本时,混合景观样本训练得到的DeepLabv3+云检测网络相比于Fmask有较高的精度与稳定性。
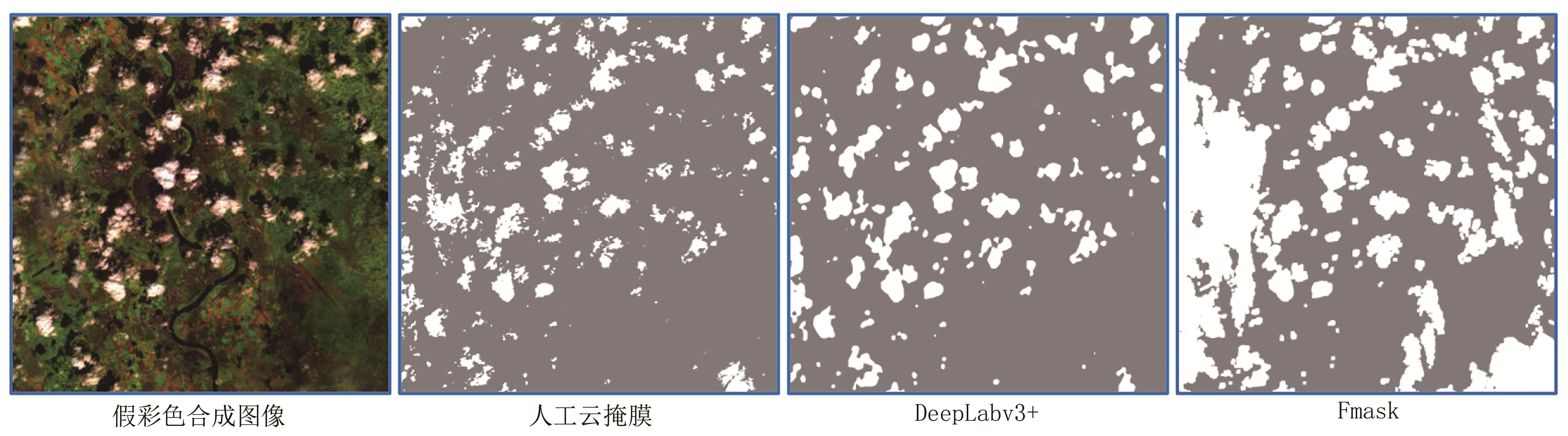
(a) 整幅图像及其云掩膜
(a) Whole image and its cloud mask
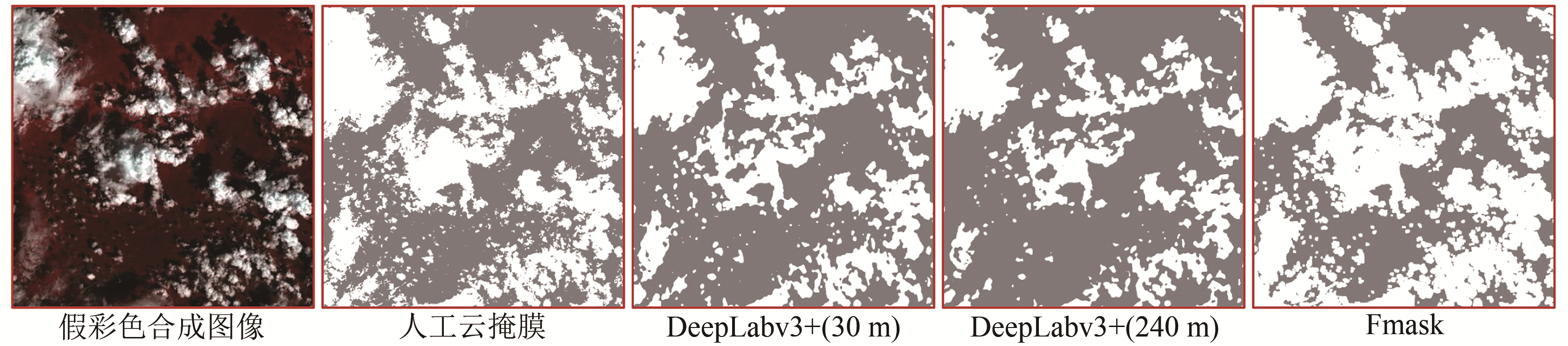
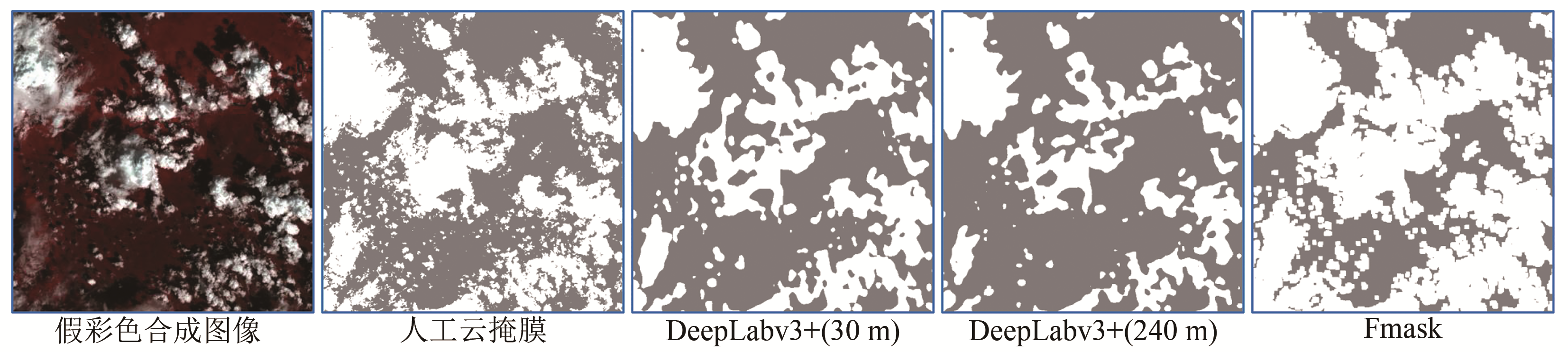
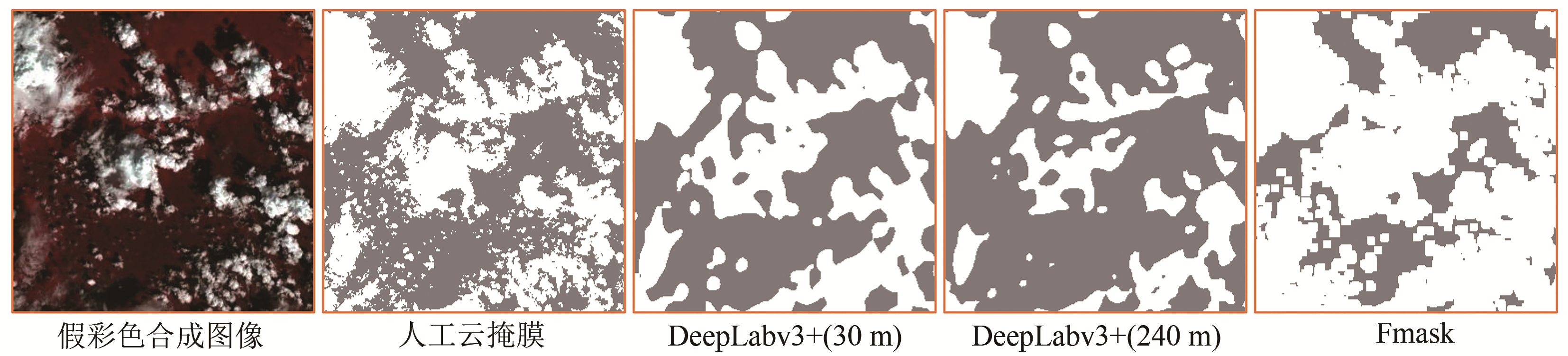
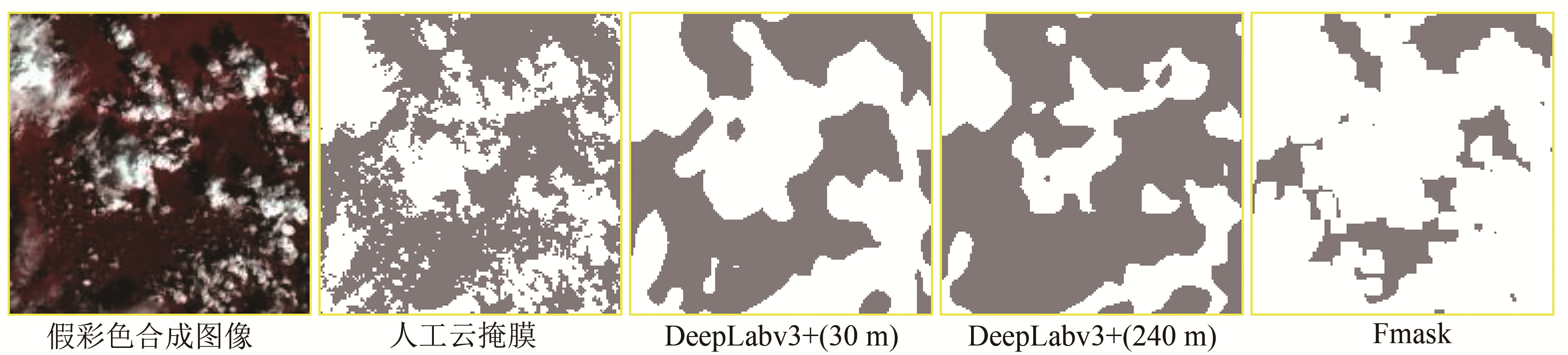
(b) 红色矩形区域放大图像
(b) Enlarged images of the subset area in the red rectangle

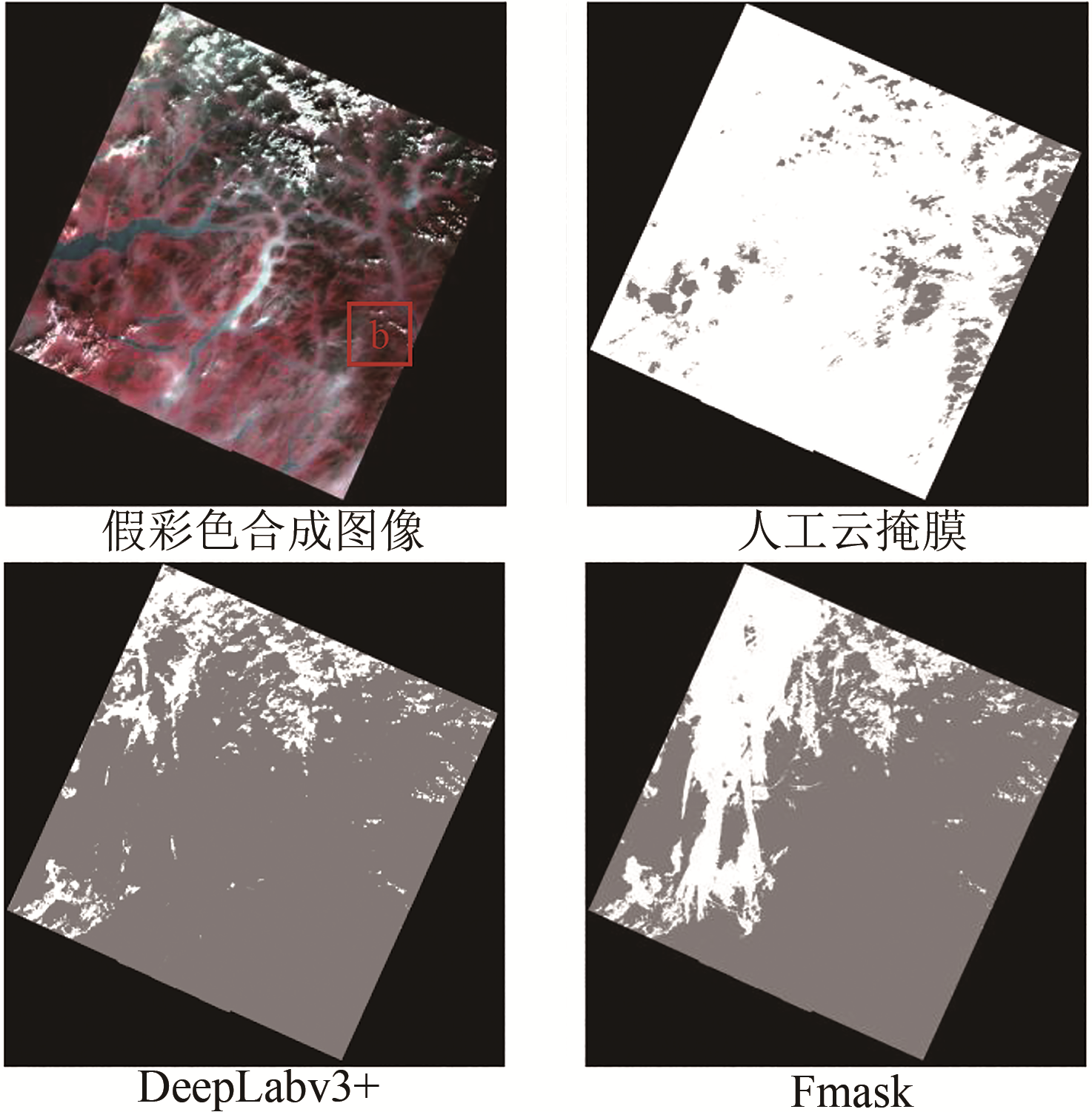
图6 一景灌丛景观Landsat图像的云检测结果(图像假彩色合成均使用波段5、4、3)
Fig.6 Cloud detection results of one Landsat image captured over shrubland(All the images are displayed using bands 5, 4 and 3 .In each cloud mask: White represents the cloud coverage area; Gray represents the cloud-free area; Black represents fill value)

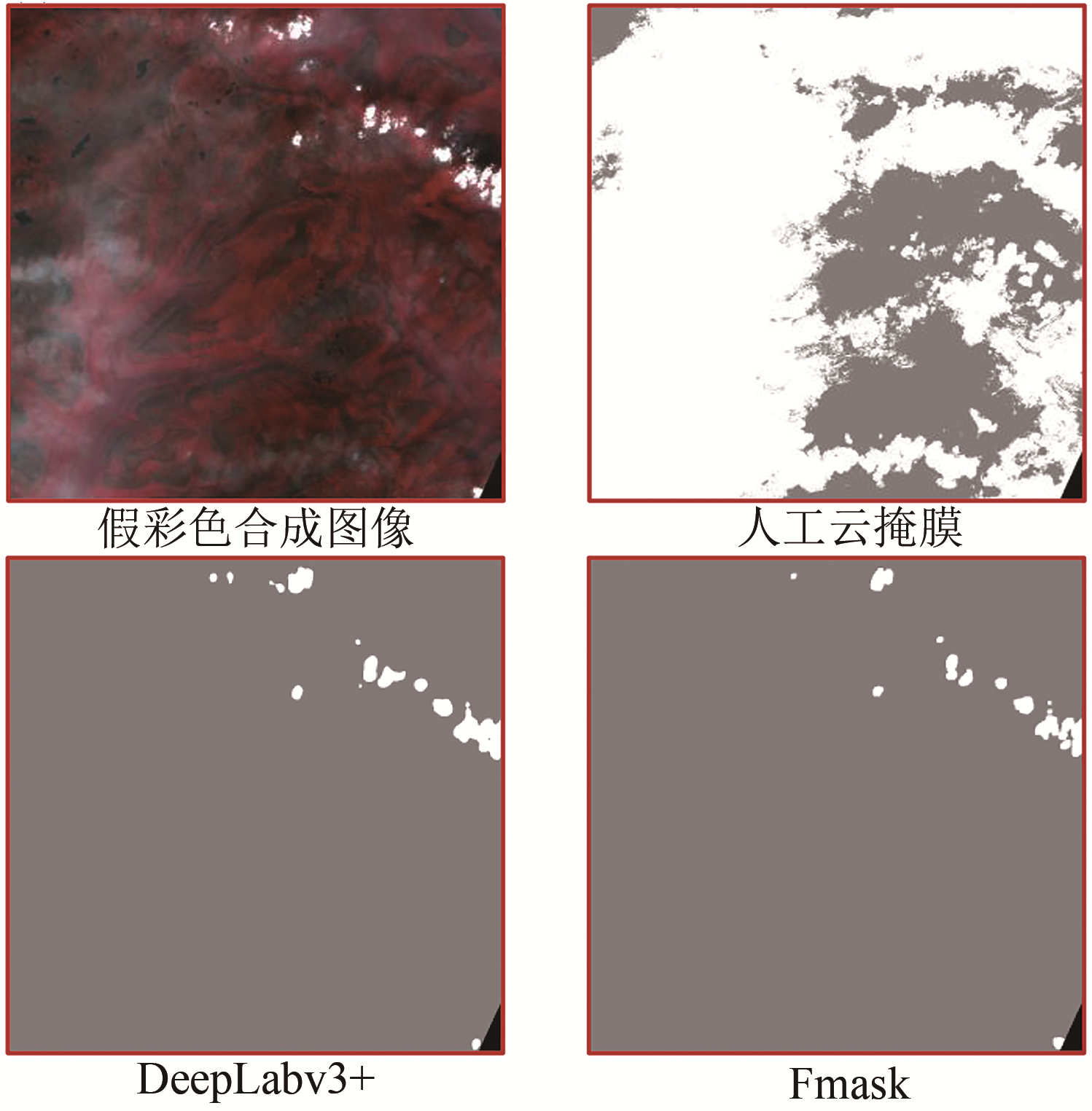
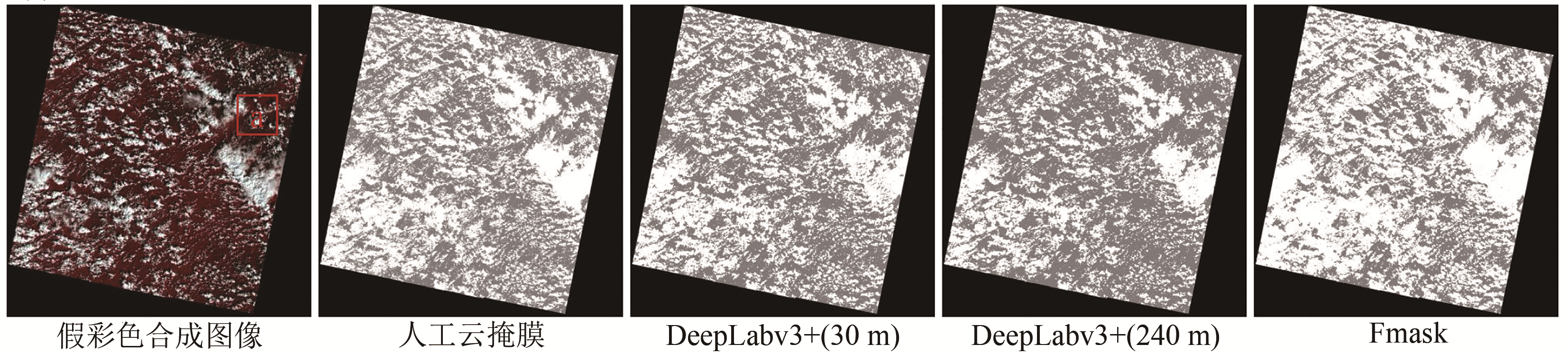
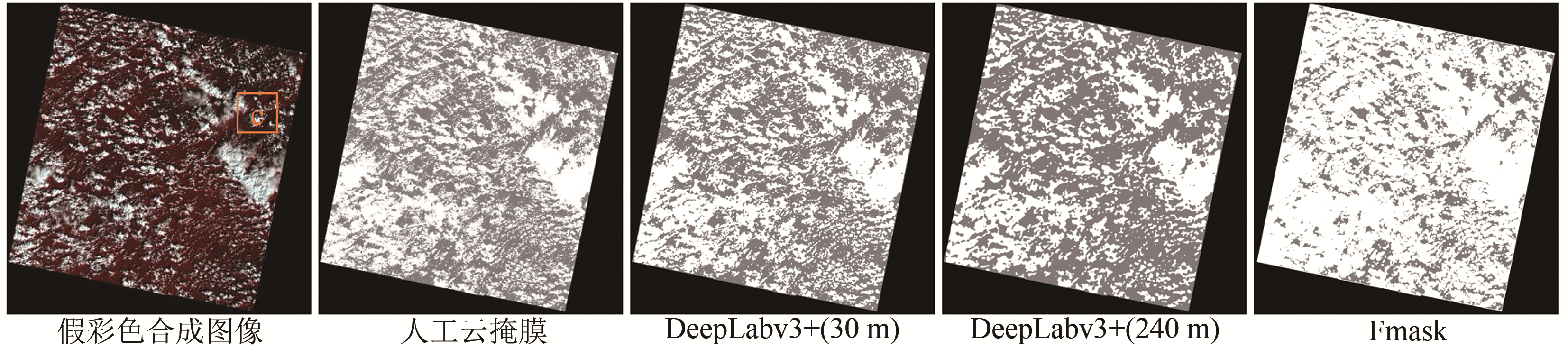
(a) 整幅冰/雪景观Landsat图像及其云掩膜
(a) Whole Landsat image captured over snow/ice and its cloud mask
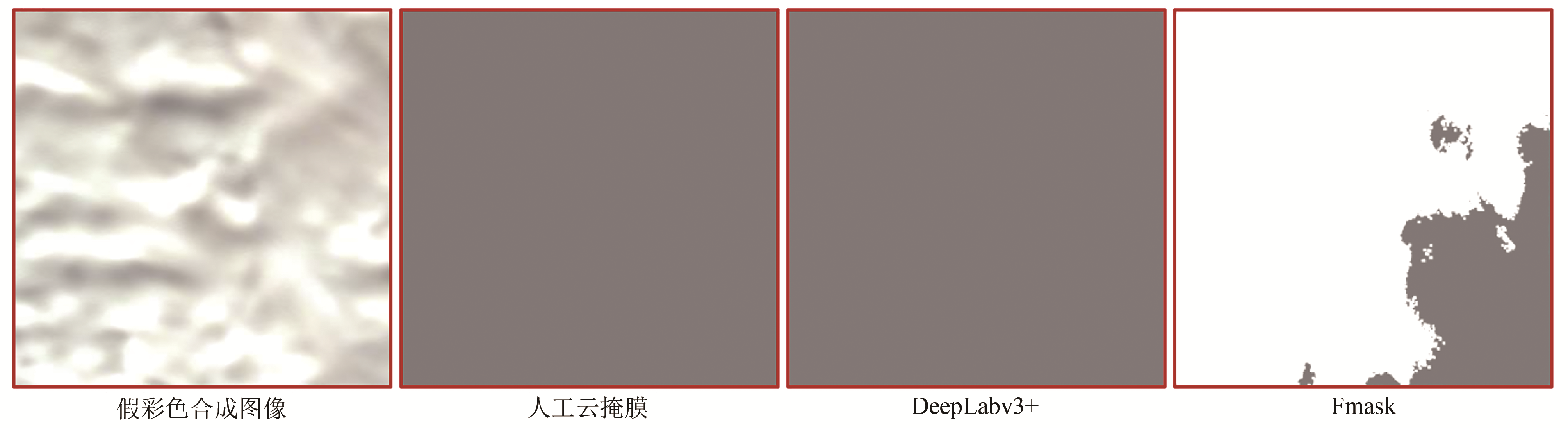
(b) 红色矩形区域放大图像
(b) Enlarged images of the subset area in the red rectangle

(c) 整幅城市景观Landsat图像及其云掩膜
(c) Whole Landsat image captured over Urban and its cloud mask
(d) 蓝色矩形区域放大图像
(d) Enlarged images of the subset area in the blue rectangle
图5 两景Landsat图像的云检测结果
Fig.5 Cloud detection results of two Landsat images
注:(a)和(b)中图像假彩色合成使用波段5、4、3,(c)和(d)中图像假彩色合成使用波段6、5、2。云掩膜中,白色为云覆盖区域,灰色为无云区域,黑色为填充值。
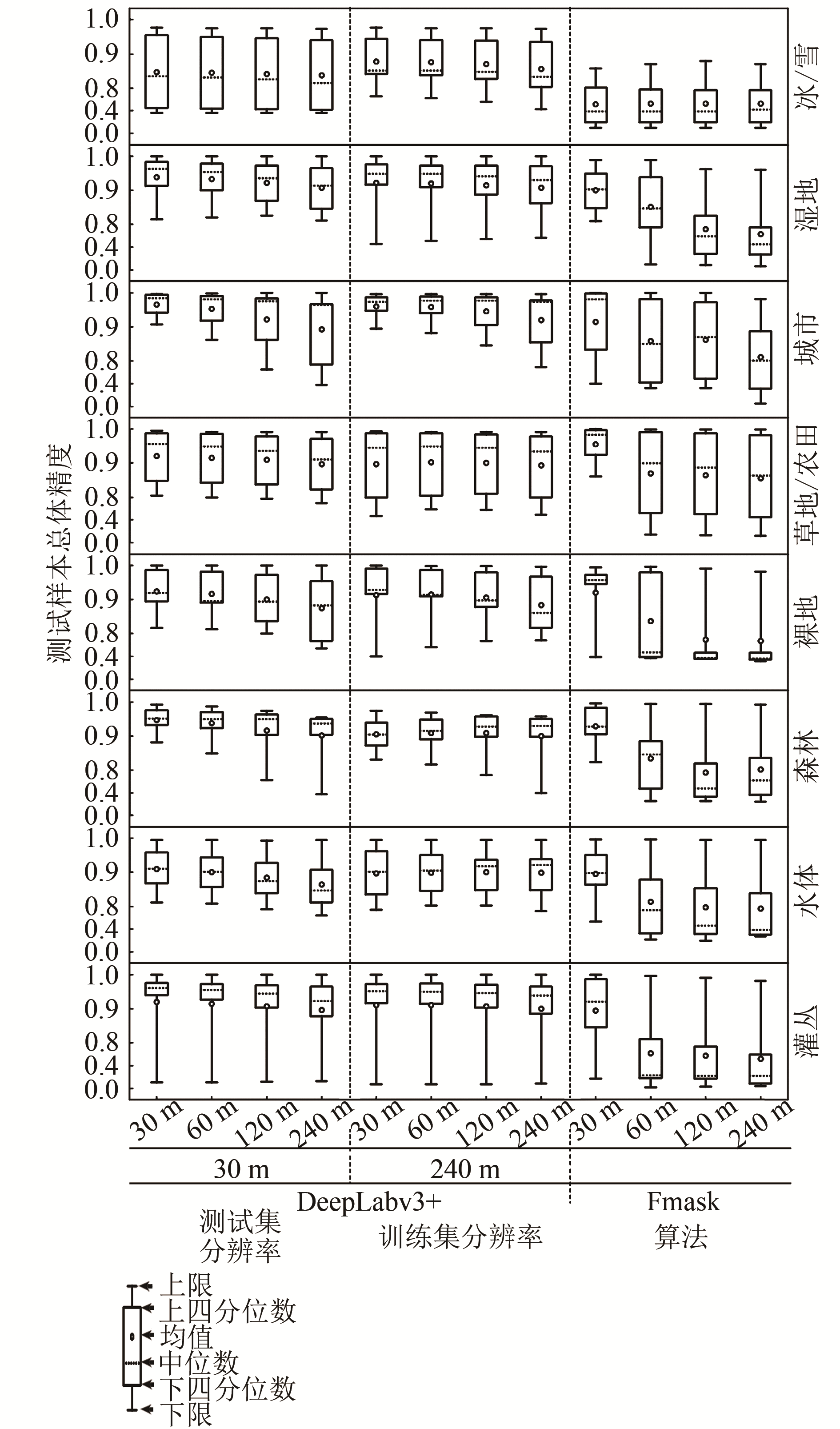
图7 30 m分辨率和240 m分辨率样本训练得到的DeepLabv3+网络及Fmask在不同空间分辨率、不同景观测试影像上的云检测总体精度(其中每个子图表示不同方法在一种景观测试影像上的精度)
Fig.7 The cloud detection accuracy of test set with different landscapes and resolutions for different cloud detection methods, i.e. DeepLabv3+ trained by training set with 30 m and 240 m resolution (each subplot represents the accuracy of test set with single landscape)
(a) 整幅30 m分辨率图像
(a) Test image with 30 m resolutio

(b) 整幅60 m分辨率图像
(b) Test image with 60 m resolution
(c) 整幅120 m分辨率图像
(c) Test image with 120 m resolution

(d) 整幅240 m分辨率图像
(d) Test image with 240 m resolution

图8 30 m分辨率和240m分辨率样本训练得到的DeepLabv3+网络及Fmask算法在不同分辨率影像上的云检测结果示例(图像假彩色合成均使用波段5、4、3)
Fig.8 The case results of DeepLabv3+ trained by the training set with 30m resolution and 240m resolution and Fmask on test images with different spatial resolutions(All the images are displayed using bands 5, 4 and 3 .In each cloud mask: White represents the cloud coverage area; Gray represents the cloud-free area; Black represents fill value)
(a) 红色矩形区域放大图像
(a) Enlarged images of the subset area in the red rectangle
(b) 蓝色矩形区域放大图像
(b) Enlarged images of the subset area in the blue rectangle
(c) 橙色矩形区域放大图像
(c) Enlarged images of the subset area in the orange rectangle
(d) 黄色矩形区域放大图像
(d) Enlarged images of the subset area in the yellow rectangle
图9 图8局部区域放大图像
Fig.9 The zoomed area of Fig.8

图10 不同波段组合样本训练得到的DeepLabv3+网络及Fmask在不同景观测试影像上的云检测总体精度(其中每个子图表示不同方法在一种景观测试影像上的精度)
Fig.10 The cloud detection accuracy of test set with different landscapes for different cloud detection methods, i.e. DeepLabv3+ trained by training set with different band combinations and Fmask (each subplot represents the accuracy of test set with single landscape)

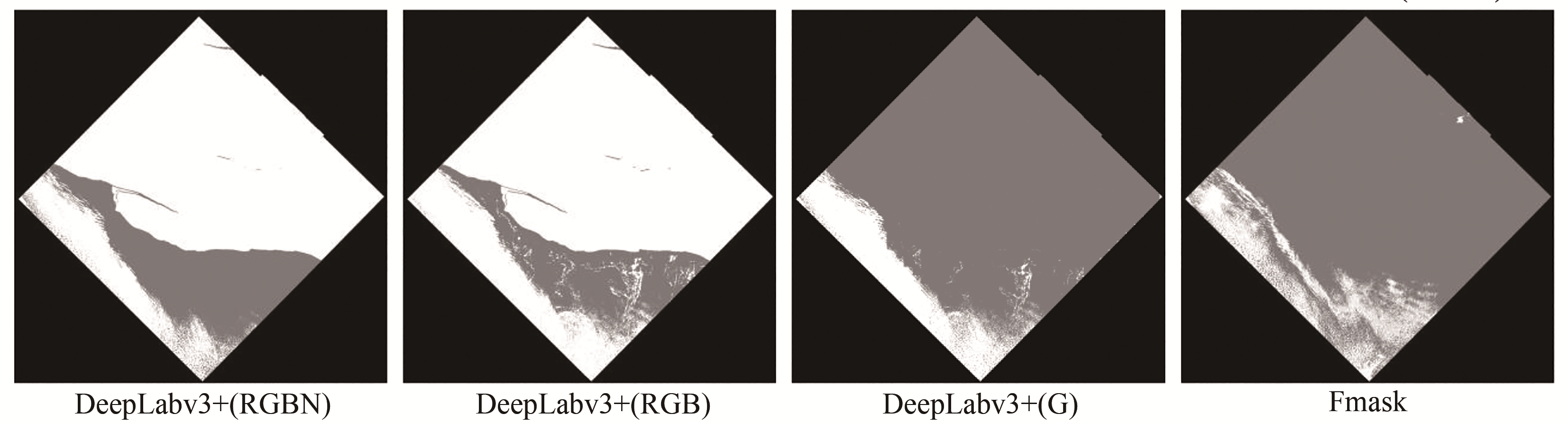
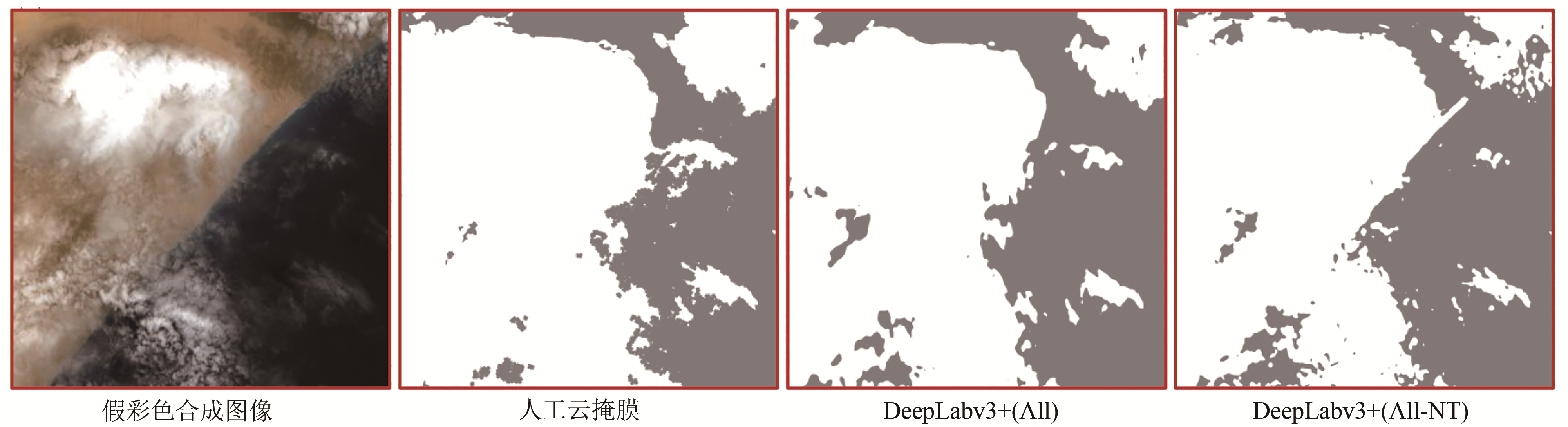
(a) 整幅图像
(a) Whole image

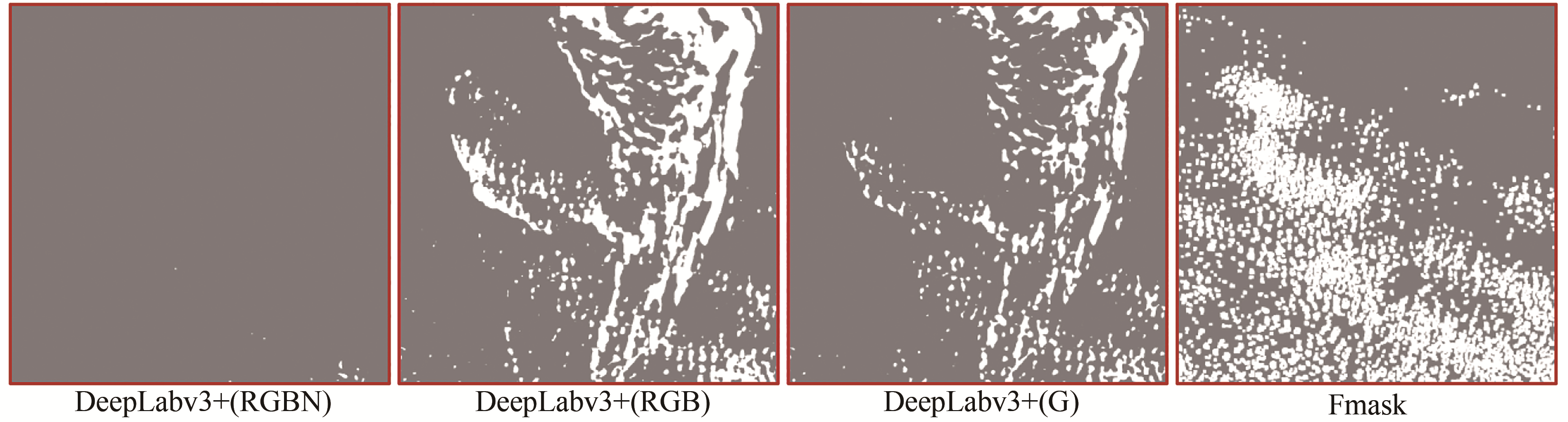
(b) 红色矩形区域放大图像
(b) Enlarged images of the subset area in the red rectangle

图11 由不同波段组合样本训练得到DeepLabv3+网络在一景冰/雪景观Landsat图像上的云检测结果(图像假彩色合成均使用波段5、4、3)
Fig. 11 Cloud detection results of the DeepLabv3+ trained by training set with different band combinations and Fmask on test images captured over snow/ice(All the images are displayed using bands 5, 4 and 3 In each cloud mask: White represents the cloud coverage area; Gray represents the cloud-free area; Black represents fill value)

(a) Whole image
(b) Enlarged images of the subset area in the red rectangle
 (b) 红色矩形区域放大图像
(b) 红色矩形区域放大图像

图12 由不同波段组合样本训练得到DeepLabv3+网络在一景裸地景观Landsat图像上的云检测结果(图像假彩色合成均使用波段5、4、3)
Fig. 12 Cloud detection results of the DeepLabv3+ trained by training set with different band combinations and Fmask on test images captured over barren(All the images are displayed using bands 5, 4 and 3)
(a) The cloud detection result of the DeepLabv3+ trained by training set with All-NT band combination on Sentinel-2A image with 20 m resolution
;(b) Enlarged images of the subset area in the red rectangle
本文通过将Landsat影像进行空间重采样、光谱波段重组模拟不同类型的遥感影像,以考查DeepLabv3+云检测网络的泛化性能。但是,现实中其他遥感传感器与Landsat传感器相比,除空间分辨率、波段设置有差异外,相应的空间响应函数、光谱响应函数也可能存在差异。本文进一步尝试将已训练好的DeepLabv3+云检测网络用于1幅20 m分辨率的Sentinel-2影像与1幅1 km分辨率的MODIS 影像,并将云检测结果与专门为Sentinel-2调整的Fmask算法(

图13 DeepLabv3+网络在Sentinel-2A影像(ID: L1C_T21MWR_A023130_20191126T141046)上的应用
Fig.13 Cloud detection examples of DeepLabv3+ on Sentinel-2A image (ID: L1C_T21MWR_A023130_20191126T141046)
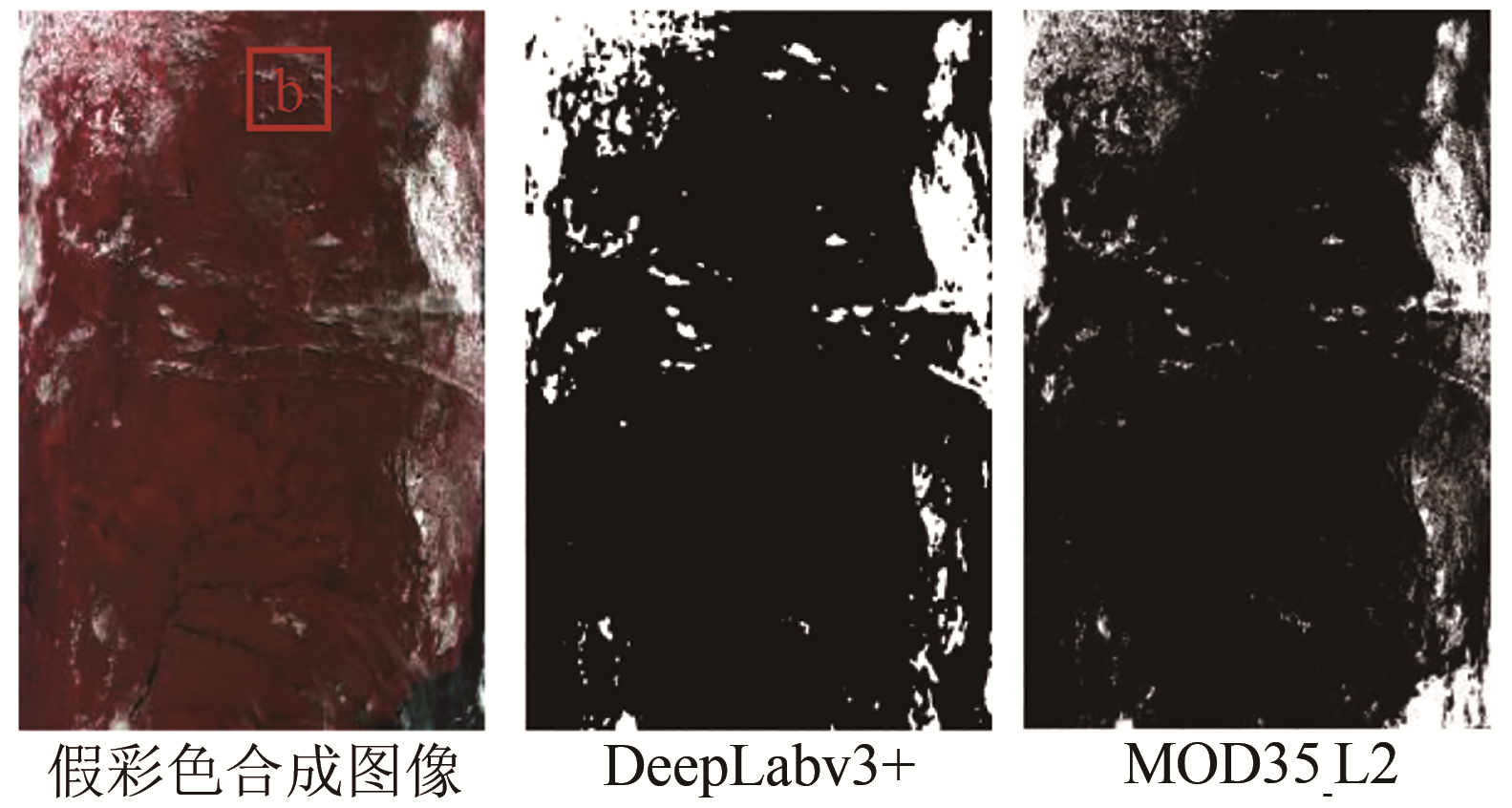
(a) 30m分辨率全混合景观样本训练得到的DeepLabv3+网络在1 km分辨率MODIS影像上的云检测结果
(a) The cloud detection result of the DeepLabv3+ trained by trained by the fully mixed training set with 30m resolution on MODIS image with 1 km resolution
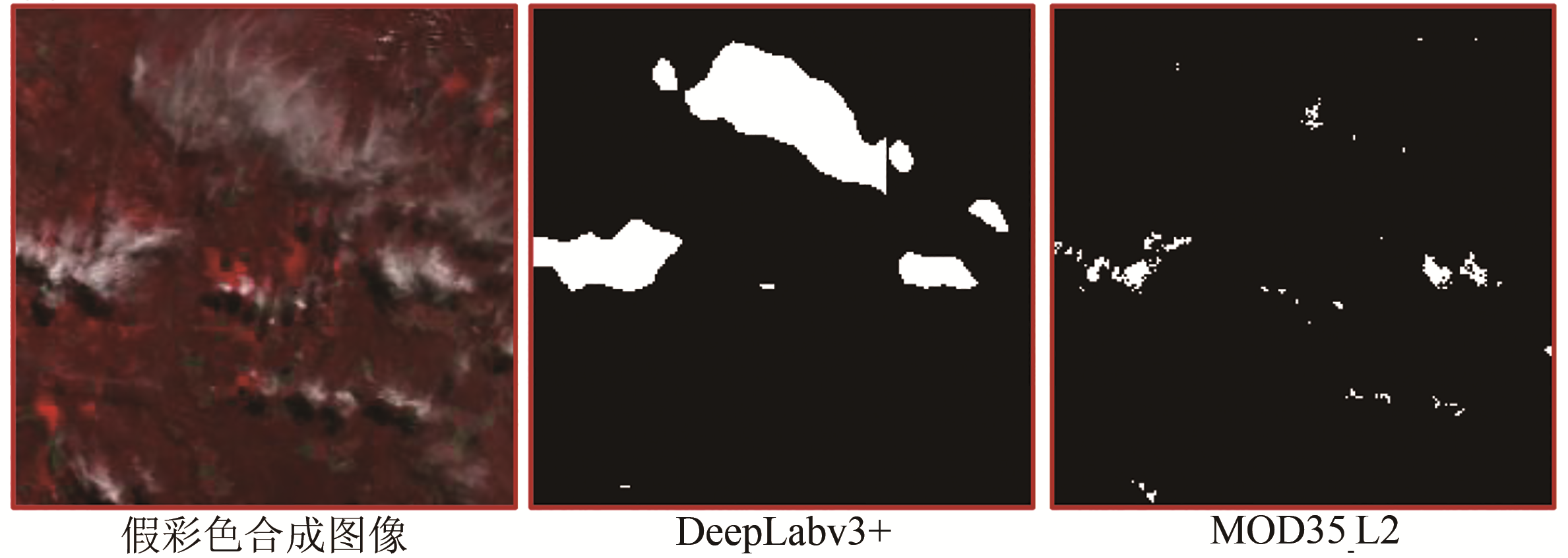
(b) 红色矩形区域放大图像,其中MOD35_L2为MODIS的云掩膜产品
(b) Enlarged images of the subset area in the red rectangle. MOD35_L2 is a cloud mask product of MODIS

图14 DeepLabv3+网络在MODIS影像(ID: MOD021KM.A2014141.1330.061.2017311185050)上的应用
Fig.14 Cloud detection examples of DeepLabv3+ on MODIS image (ID: MOD021KM.A2014141.1330.061.2017311185050)
本文的实验用总体精度表征云检测的性能,但是不同用户可能对于错分和漏分性能有不同的倾向。有学者认为云检测需要适当减少漏分而容忍错分,这也是Fmask算法的设计倾向(
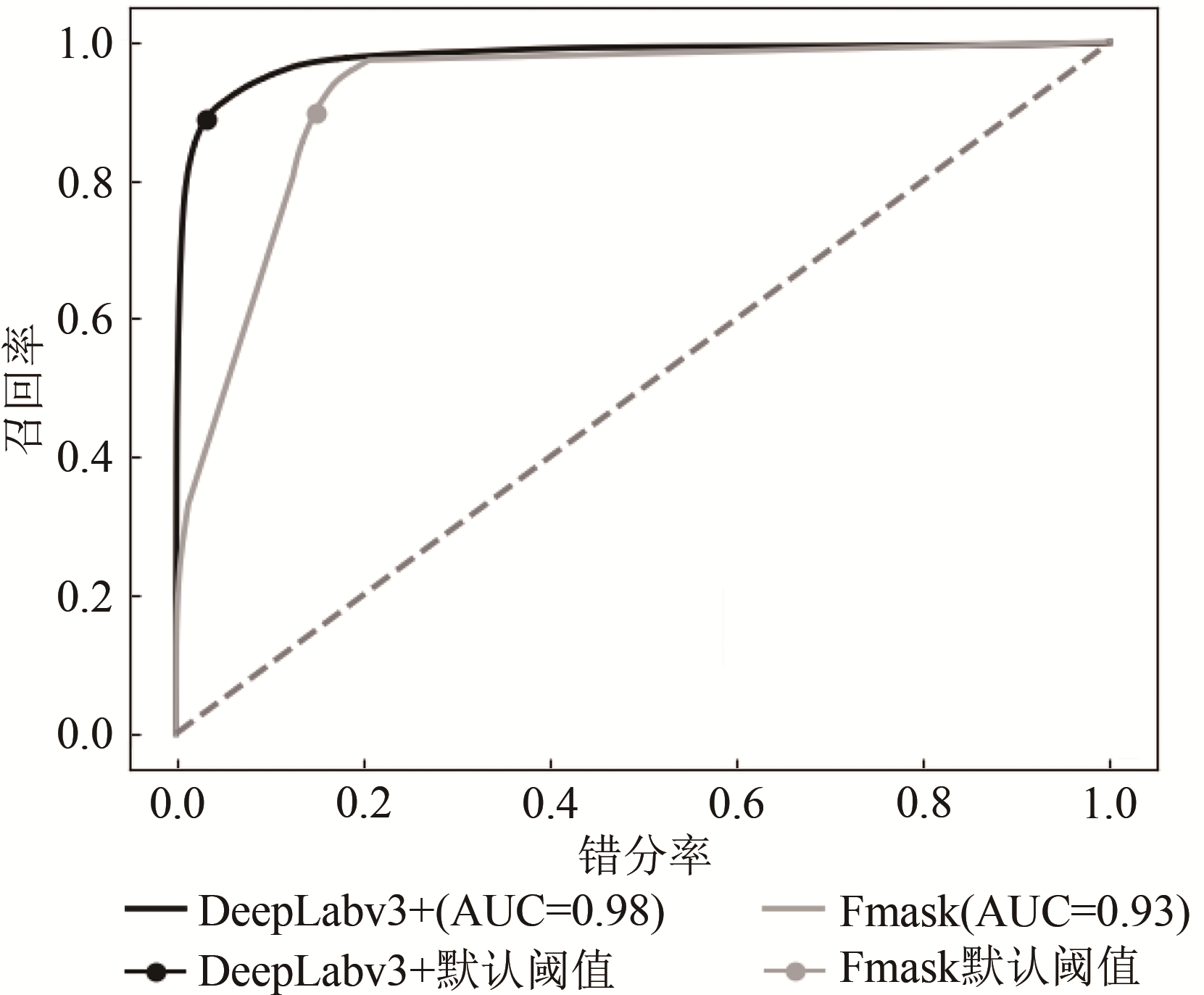
图15 30 m分辨率全混合景观样本训练得到的DeepLabv3+网络及Fmask算法在所有测试影像上的ROC曲线
Fig.15 The receiver operating characteristic curves (ROC) of the DeepLabv3+ trained by the fully mixed training set with 30m resolution and Fmask on all the test images
但是,本文也发现基于DeepLabv3+云检测的一些问题。首先,在一些特殊的影像中,比如在灌丛景观测试集中的一景影像(
本研究使用“L8 Biome”数据集构建不同的训练集和测试集,分别训练DeepLabv3+网络并测试其云检测的精度,探究了该算法在不同地表景观、不同空间分辨率以及不同光谱波段组合影像上的泛化性能。主要结果如下:(1)使用全混合景观类型的训练集训练出来的云检测网络在总体检测精度(92.81%)与稳定度(标准差12.08%)上都优于使用单一景观类型的训练集训练得到的云检测网络,也优于Fmask的总体精度(88.75%)与稳定度(标准差17.34%);(2)将全混合景观训练集中剔除一类景观的样本(冰/雪景观除外)构建的“混合-1”训练集与全混合景观训练集训练的DeepLabv3+网络的云检测精度也相差不大;(3)基于30 m空间分辨率的全混合景观训练样本集训练得到的DeepLabv3+云检测网络在不同分辨率(30 m、60 m、120 m、240 m)的测试集上云检测精度差异不大,都取得较好的效果,相反Fmask直接应用于低分辨率影像时精度明显下降;(4) DeepLabv3+能充分自适应不同波段的信息用于云检测,并且更多的光谱波段输入总的来说能够提高DeepLabv3+的云检测的精度和稳定度,其中短波红外波段对于DeepLabv3+区分冰/雪与云具有重要价值,而热红外波段对DeepLabv3+云检测网络的性能提升很微小。以上结果表明训练DeepLabv3+云检测网络,最好包括多种地表景观的影像样本,一定要包括冰/雪景观的影像样本。但是缺少一部分除冰/雪外的其他景观影像的训练样本并不会影响云检测精度,因此本文认为对于现有样本库“L8 Biome”数据集,已能覆盖绝大多数情况,进一步增加样本对云检测的精度提升有限。此外,基于“L8 Biome”数据训练的DeepLabv3+云检测网络能够直接应用于不同空间分辨率的遥感影像并取得较高的云检测精度;也能通过对训练集进行波段重组的方式迁移应用到不同波段组合的遥感影像以充分发挥不同波段的信息。综上,DeepLabv3+具备比Fmask算法更高的云检测精度与灵活度,能够适用于不同景观、不同空间分辨率与不同波段组合的遥感影像。
参考文献(References)
Ball J E, Anderson D T and Chan C S. 2017. Comprehensive survey of deep learning in remote sensing: theories, tools, and challenges for the community. Journal of Applied Remote Sensing, 11(4): 042609 [DOI: 10.1117/1.JRS.11.042609] [百度学术]
Chen L C, Papandreou G, Schroff F and Adam H. 2017. Rethinking atrous convolution for semantic image segmentation[EB/OL]. (2017-12-05). http://arxiv.org/pdf/1706.05587v3 [百度学术]
Chen L C, Zhu Y K, Papandreou G, Schroff F and Adam H. 2018. Encoder-decoder with atrous separable convolution for semantic image segmentation//Proceedings of the 15th European Conference on Computer Vision. Munich, Germany: Springer: 833-851 [DOI: 10.1007/978-3-030-01234-2_49] [百度学术]
Chen Q, Zheng L J, Li X J, Xu C B, Wu Y, Xie D H and Liu L. 2019. Water body extraction from high-resolution satellite remote sensing images based on deep learning. Geography and Geo-information Science, 35(4): 43-49 [百度学术]
陈前, 郑利娟, 李小娟, 徐崇斌, 吴俣, 谢东海, 刘亮. 2019. 基于深度学习的高分遥感影像水体提取模型研究. 地理与地理信息科学, 35(4): 43-49[DOI: 10.3969/j.issn.1672-0504.2019.04.007] [百度学术]
Chen S L, Chen X H, Chen J, Jia P F, Cao X and Liu C Y. 2016. An iterative haze optimized transformation for automatic cloud/haze detection of Landsat imagery. IEEE Transactions on Geoscience and Remote Sensing, 54(5): 2682-2694 [DOI: 10.1109/TGRS.2015.2504369] [百度学术]
Chen X D, Zhang X, Liu L Y and Wang X F. 2019. Enhanced multi-temporal cloud detection algorithm for optical remote sensing images. Journal of Remote Sensing, 23(2): 280-290 [百度学术]
陈曦东, 张肖, 刘良云, 汪晓帆. 2019. 增强型多时相云检测. 遥感学报, 23(2): 280-290 [DOI: 10.11834/jrs.20198017] [百度学术]
Foga S, Scaramuzza P L, Guo S, Zhu Z, Dilley Jr R D, Beckmann T, Schmidt G L, Dwyer J L, Joseph Hughes M and Laue B. 2017. Cloud detection algorithm comparison and validation for operational Landsat data products. Remote Sensing of Environment, 194: 379-390 [DOI: 10.1016/j.rse.2017.03.026] [百度学术]
Frantz D, Haß E, Uhl A, Stoffels J and Hill J. 2018. Improvement of the Fmask algorithm for Sentinel-2 images: separating clouds from bright surfaces based on parallax effects. Remote Sensing of Environment, 215: 471-481 [DOI: 10.1016/j.rse.2018.04.046] [百度学术]
Harshvardhan, Randall D A and Corsetti T G. 1989. Earth radiation budget and cloudiness simulations with a general circulation model. Journal of the Atmospheric Sciences, 46(13): 1922-1942 [DOI: 10.1175/1520-0469(1989)046<1922:ERBACS>2.0.CO;2] [百度学术]
Hughes M J and Hayes D J. 2014. Automated detection of cloud and cloud shadow in single-date Landsat imagery using neural networks and spatial post-processing. Remote Sensing, 6(6): 4907-4926 [DOI: 10.3390/rs6064907] [百度学术]
Irish R R. 2000. Landsat 7 automatic cloud cover assessment//Proceedings of SPIE 4049, Algorithms for Multispectral, Hyperspectral, and Ultraspectral Imagery VI. Orlando, USA: SPIE: 348-355 [DOI: 10.1117/12.410358] [百度学术]
Jedlovec G J, Haines S L and LaFontaine F J. 2008. Spatial and temporal varying thresholds for cloud detection in GOES imagery. IEEE Transactions on Geoscience and Remote Sensing, 46(6): 1705-1717 [DOI: 10.1109/TGRS.2008.916208] [百度学术]
Jeppesen J H, Jacobsen R H, Inceoglu F and Toftegaard T S. 2019. A cloud detection algorithm for satellite imagery based on deep learning. Remote Sensing of Environment, 229: 247-259 [DOI: 10.1016/j.rse.2019.03.039] [百度学术]
Lee J, Weger R C, Sengupta S K and Welch R M. 1990. A neural network approach to cloud classification. IEEE Transactions on Geoscience and Remote Sensing, 28(5): 846-855 [DOI: 10.1109/36.58972] [百度学术]
Li Z W, Shen H F, Cheng Q, Liu Y H, You S C and He Z Y. 2019. Deep learning based cloud detection for medium and high resolution remote sensing images of different sensors. ISPRS Journal of Photogrammetry and Remote Sensing, 150: 197-212 [DOI: 10.1016/j.isprsjprs.2019.02.017] [百度学术]
Li Z W, Shen H F, Li H F, Xia G S, Gamba P and Zhang L P. 2017. Multi-feature combined cloud and cloud shadow detection in GaoFen-1 wide field of view imagery. Remote Sensing of Environment, 191: 342-358 [DOI: 10.1016/j.rse.2017.01.026] [百度学术]
Lyu M M, Han L J, Tian S F, Zhou W Q, Li W F and Qian Y G. 2016. Cloud detection under varied surfaces and atmospheric conditions with MODIS imagery. Journal of Remote Sensing, 20(6): 1371-1380 [百度学术]
吕明明, 韩立建, 田淑芳, 周伟奇, 李伟峰, 钱雨果. 2016. 多样地表和大气状况下的MODIS数据云检测. 遥感学报, 20(6): 1371-1380 [DOI: 10.11834/jrs.20165281] [百度学术]
Mateo-García G, Laparra V, López-Puigdollers D and Gómez-Chova L. 2020. Transferring deep learning models for cloud detection between Landsat-8 and Proba-V. ISPRS Journal of Photogrammetry and Remote Sensing, 160: 1-17 [DOI: 10.1016/j.isprsjprs.2019.11.024] [百度学术]
Papadomanolaki M, Vakalopoulou M, Zagoruyko S and Karantzalos K. 2016. Benchmarking deep learning frameworks for the classification of very high resolution satellite multispectral data. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 3(7): 83-88 [DOI: 10.5194/isprs-annals-III-7-83-2016] [百度学术]
Prasad A K, Chai L, Singh R P and Kafatos M. 2006. Crop yield estimation model for Iowa using remote sensing and surface parameters. International Journal of Applied Earth Observation and Geoinformation, 8(1): 26-33 [DOI: 10.1016/j.jag.2005.06.002] [百度学术]
Qiu S, Zhu Z and He B B. 2019. Fmask 4.0: improved cloud and cloud shadow detection in Landsats 4-8 and Sentinel-2 imagery. Remote Sensing of Environment, 231: 111205 [DOI: 10.1016/j.rse.2019.05.024] [百度学术]
Roy D P, Ju J C, Kline K, Scaramuzza P L, Kovalskyy V, Hansen M, Loveland T R, Vermote E and Zhang C S. 2010. Web-enabled Landsat Data (WELD): landsat ETM+ composited mosaics of the conterminous United States. Remote Sensing of Environment, 114(1): 35-49 [DOI: 10.1016/j.rse.2009.08.011] [百度学术]
Saunders R W and Kriebel K T. 1988. An improved method for detecting clear sky and cloudy radiances from AVHRR data. International Journal of Remote Sensing, 9(1): 123-150 [DOI: 10.1080/014 31168808954841] [百度学术]
Schmidhuber J. 2015. Deep learning in neural networks: an overview. Neural Networks, 61: 85-117 [DOI: 10.1016/j.neunet.2014.09.003] [百度学术]
Shan N, Zheng T Y and Wang Z S. 2009. High-speed and high-accuracy algorithm for cloud detection and its application. Journal of Remote Sensing, 13(6): 1138-1155 [百度学术]
单娜, 郑天垚, 王贞松. 2009. 快速高准确度云检测算法及其应用. 遥感学报, 13(6): 1138-1155 [DOI: 10.11834/jrs.20090612] [百度学术]
Shen H F, Li X H, Cheng Q, Zeng C, Yang G, Li H F and Zhang L P. 2015. Missing information reconstruction of remote sensing data: a technical review. IEEE Geoscience and Remote Sensing Magazine, 3(3): 61-85 [DOI: 10.1109/MGRS.2015.2441912] [百度学术]
Stowe L L, Davis P A and McClain E P. 1999. Scientific basis and initial evaluation of the CLAVR-1 global clear/cloud classification algorithm for the advanced very high resolution radiometer. Journal of Atmospheric and Oceanic Technology, 16(6): 656-681 [DOI: 10.1175/1520-0426(1999)016<0656:SBAIEO>2.0.CO;2] [百度学术]
Sun L, Yang X, Jia S F, Jia C, Wang Q, Liu X Y, Wei J and Zhou X Y. 2020. Satellite data cloud detection using deep learning supported by hyperspectral data. International Journal of Remote Sensing, 41(4): 1349-1371 [DOI: 10.1080/01431161.2019.1667548] [百度学术]
Verbesselt J, Hyndman R, Newnham G and Culvenor D. 2010. Detecting trend and seasonal changes in satellite image time series. Remote Sensing of Environment 114(1): 106-115 [DOI: 10.1016/j.rse.2009.08.014] [百度学术]
Wang J Q, Li J S, Zhou H C and Zhang X. 2019. Typical element extraction method of remote sensing image based on Deeplabv3 + and CRF. Computer Engineering, 45(10): 260-265, 271 [百度学术]
王俊强, 李建胜, 周华春, 张旭. 2019. 基于Deeplabv3+与CRF的遥感影像典型要素提取方法. 计算机工程, 45(10): 260-265, 271 [DOI: 10.19678/j.issn.1000-3428.0053359] [百度学术]
Yang W, Zhang J L, Xu Z Y and Hu K. 2019. Real-time DeepLabv3+ for pedestrian segmentation. Journal of Optical Technology, 86(9): 570-578 [DOI: 10.1364/JOT.86.000570] [百度学术]
Zhang Y C, Rossow W B, Lacis A A, Oinas V and Mishchenko M I. 2004. Calculation of radiative fluxes from the surface to top of atmosphere based on ISCCP and other global data sets: refinements of the radiative transfer model and the input data. Journal of Geophysical Research, 109(D19): D19105 [DOI: 10.1029/2003J D004457] [百度学术]
Zhu X L and Helmer E H. 2018a. An automatic method for screening clouds and cloud shadows in optical satellite image time series in cloudy regions. Remote Sensing of Environment, 214: 135-153 [DOI: 10.1016/j.rse.2018.05.024] [百度学术]
Zhu Z, Qiu S, He B B and Deng C B. 2018b. Cloud and cloud shadow detection for Landsat images: the fundamental basis for analyzing Landsat time series//Weng Q H, ed. Remote Sensing Time Series Image Processing. Boca Raton: CRC Press: 25-46 [百度学术]
Zhu Z, Wang S X and Woodcock C E. 2015. Improvement and expansion of the Fmask algorithm: cloud, cloud shadow, and snow detection for Landsats 4-7, 8, and Sentinel 2 images. Remote Sensing of Environment, 159: 269-277 [DOI: 10.1016/j.rse.2014.12.014] [百度学术]
Zhu Z and Woodcock C E. 2012. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sensing of Environment, 118: 83-94 [DOI: 10.1016/j.rse.2011.10.028] [百度学术]
Zi Y, Xie F Y and Jiang Z G. 2018a. A cloud detection method for Landsat 8 images based on PCANet. Remote Sensing, 10(6): 877 [DOI: 10.3390/rs10060877] [百度学术]

